テクノロジー・材料
サイバニクス空間で日常生活を支援する人協調型ロボットを開発
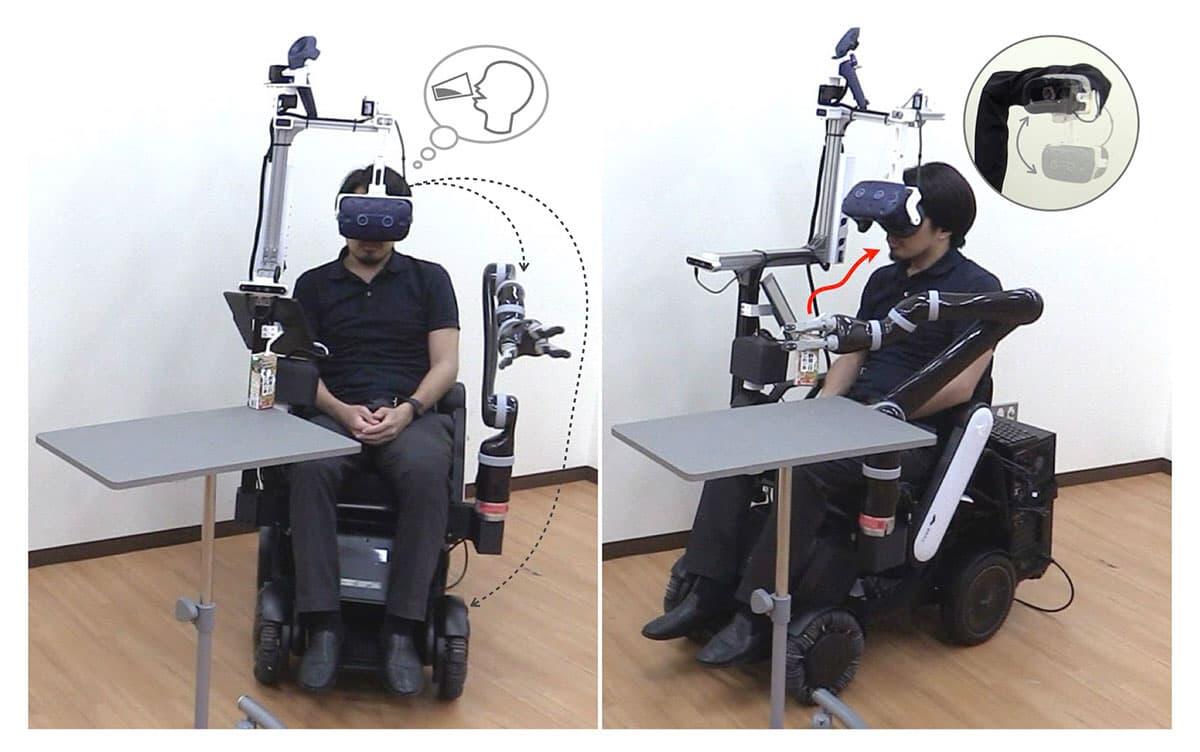
物理空間とサイバー空間とを行き来するサイバニクス空間において稼働する人協調型ロボットを開発しました。人の運動意思が反映された生体信号により、アームハンドシステムとIoTシステムを操作し、身体的・空間的な制約を受けずに日常生活での動作を支援することが可能です。
加齢や疾患に起因する運動機能や認知機能の低下は、日常生活やコミュニケーションを困難にし、不安やうつ状態をもたらすこともあります。このような状況に柔軟に対応しながら、日常生活の自立度を向上させるための一つの手段として、人の運動意思を反映できる人協調型ロボットの開発があります。
本研究では、神経難病患者や高齢者が身体を動かすことなく、日常生活の動作を遂行するための技術開発を行いました。物理空間とサイバー空間とを行き来するサイバニクス空間において、人の運動意思が反映された生体電位信号と視線情報を用い、人とシステムとの関わり方に対する3つのモードをシームレスに切り替えることで、物理空間とサイバー空間の間を移動するとともに、アームハンドシステムとIoTシステムを操作可能な人協調型ロボットを開発しました。基本性能の検証では、生活空間で想定される日常的な動作の成功率は高く、使いやすさについても一定の評価が得られました。運動意思によりさまざまな人の自立度を向上させる本技術は、介護負担の軽減や医療費削減にも貢献すると期待されます。
PDF資料
プレスリリース研究代表者
筑波大学 システム情報系上原 皓 助教
掲載論文
- 【題名】
-
Development of human collaborative robot to perform daily tasks based on multimodal vital information with cybernics space.
(サイバニクス空間において多次元生理情報に基づき日常生活動作を支援する人協調型ロボットの開発) - 【掲載誌】
- Frontiers in Robotics and AI
- 【DOI】
- 10.3389/frobt.2025.1462243
関連リンク
システム情報系

