サイボーグ型ロボットは装着者の意思の力により脳の可塑性を引き出す
装着者がロボットを自ら動かそうとする「意思」がある時、高次な動作の計画や準備を制御する運動前野などの脳領域が活発に働くことを、ロボット動作中の脳計測により世界で初めて明らかにしました。装着者の意思に応じて動くロボットを用いた能動的治療が、脳の再構築を助ける可能性を示しています。
病気やけがで手足が動かしにくくなった人たちのために、腕や足の動きをサポートし、脳が運動を学習することを支援するニューロ・リハビリテーション用のロボットが少しずつ広まってきています。しかし、そのロボットに「ただ動かされる」場合と、「自分で動かそう」と考えながら使う場合とで、それぞれ脳がどのように反応するのかは、これまで十分に分かっていませんでした。脳がどのように学び、変化し、機能を回復していくかを考える上で、この違いを明らかにすることはとても重要です。
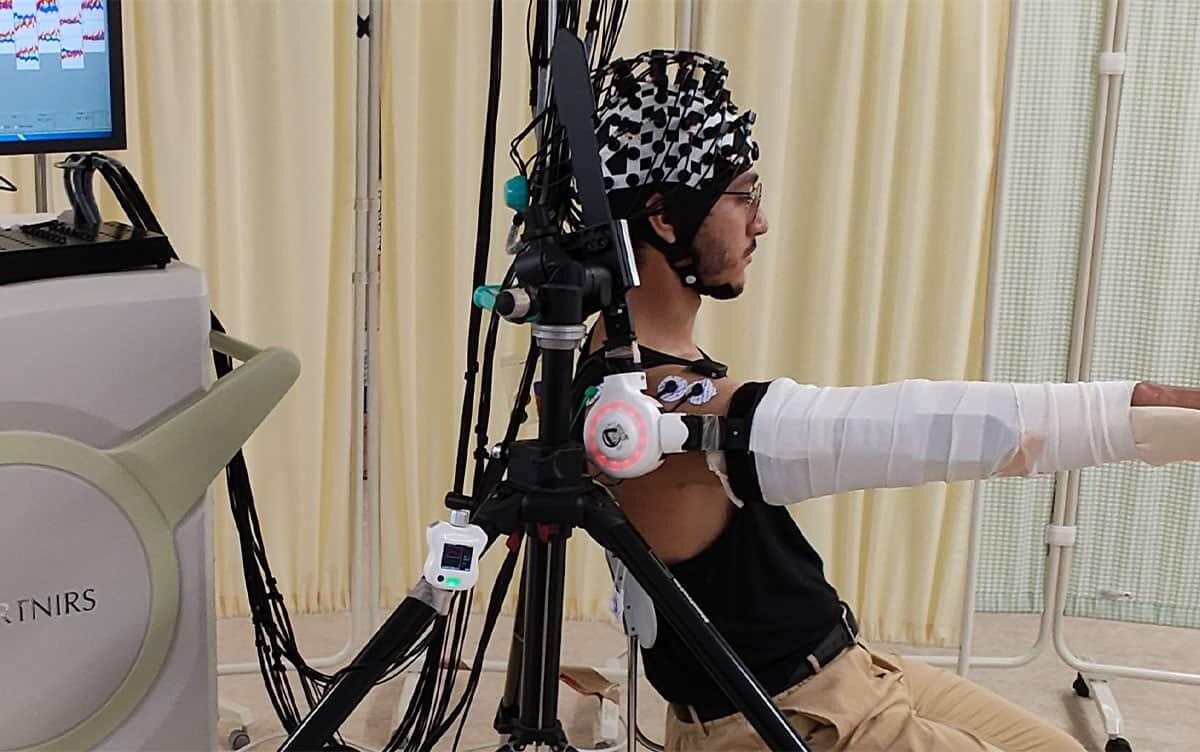
本研究チームは、健康な人たちに腕を上げる動作をしてもらい、その時の脳の活動をサイボーグ型ロボット(CYBERDYNE株式会社の装着型サイボーグHAL®)を用いて三つの条件にて詳しく調べました。一つ目は、「自分で動かそう」という意思を持ちながらロボットが動きを補助する「能動的ロボット支援」。二つ目は、ロボットに任せて動かされるだけの「受動的ロボット支援」。三つ目は、ロボットを使わず自力で腕を上げる「自発運動」です。
脳の血流の変化を捉えるfNIRS(機能的近赤外分光法)という装置を使って測定したところ、「能動的ロボット支援」と「自発運動」の時には、運動をつかさどる脳の領域が有意に多く活動していました。特に、運動前野や補足運動野に代表される、動作を計画・準備する高次運動野の領域が強く働いていたのです。一方で、受動的に動かされているだけの時には、動かしている腕と同じ側の脳や、高次運動野の活動が低いことが分かりました。
この結果は、リハビリーションやロボット治療において「自分で動かそう」という意思を持つことが、より広範な脳活動を引き出し、脳の学習や回復を促す上でとても重要であることを示しており、人とロボットが協力し、装着者の「意思に応じて動く」サイボーグのようなリハビリテーション技術により、これからの医療を大きく進化させる可能性を開くものです。
PDF資料
プレスリリース研究代表者
筑波大学システム情報系Margaux Noémie Lafitte 研究員
掲載論文
- 【題名】
-
Cerebral correlates of robot-assisted upper limb motion driven by motor intention in healthy individuals: an fNIRS study
(運動意思により駆動するロボット支援上肢運動における脳活動:fNIRSによる研究) - 【掲載誌】
- IEEE Transactions on Neural Systems and Rehabilitation Engineering
- 【DOI】
- 10.1109/TNSRE.2025.3578796
関連リンク
システム情報系

PREVIOUS
濾胞性リンパ腫の微小環境における新たなT細胞を発見