TSUKUBA FUTURE #027:手を創って脳を知る
システム情報系 星野 聖(ほしの きよし) 教授
星野さんの関心事は、ロボットの知能化ではなく、人間の動きを正確に真似る機能です。そのようなロボットは、遠隔操作で複雑な仕事を人の代わりに行う場面で役立ちます。たとえば、オペレータの作業環境とロボットとをネットワーク通信でつなぎ、人間が行う動作をロボットが再現するというしくみです。全自動でお任せとはいきませんが、ロボットにさせたい作業を正確かつ臨機応変に実行させられます。
これまでに開発したのはロボットハンド、腕と手のロボットです。見た目はいかにも機械ですが、人間の大人の手と同じ大きさ・重さで設計することにこだわりました。そのためには、人間のような器用で複雑な動きをするために不可欠なモーターの数や位置に工夫が必要でした。たとえばロボットハンド1号機・2号機に組み込まれたモーター(関節)はたったの8個。これで手指の多様な動きを作り出します。ユニークなのは指を開閉する動きです。見過ごされがちな動きですが、Vサインのような形など、手話の指文字表現には重要で、これによって身振りでの細かい情報伝達ができます。3号機・4号機では、さらに指先に小さなモーターを付け、薄い紙をめくるなど、より人間らしい作業も可能になりました。腕も、空気圧を使って、速くゆっくり固く柔らかく動くロボットアームを開発しました。
人間の手の動きを認識して指文字をまねるロボットハンド
他人の手の形を見てそれを瞬時に再現する。そのとき人間の脳は、死角になっている部分の情報も補っています。高度な人工知能を組み込んでいないロボットに同じ動作をさせるにはどうすればよいか。星野さんたちのアイデアは、あらかじめ用意した手の形のデータベースからいちばん近い形を選び出させるというものです。研究室のメンバー総出で、考えられる限りの手の形を撮影し、70万件ほどのデータベースを構築しました。ロボットは人の手の形を捉えると、1秒間に150件という超高速でデータベースと照合し、その中から最も似た形を出力します。
私たちは、周囲の人がしていることを真似るだけで、特別に教わらなくても試行錯誤によっていろいろな動作を習得します。単なる「見様見真似」ではなく、真似ているうちに動作の本質を理解するのです。人間の動きを真似て、それを再現できるロボットができれば、いろいろな動作をさせるためのプログラムをロボットに与える必要はなくなりますし、定量的には表しにくい職人技なども再現できるはずです。
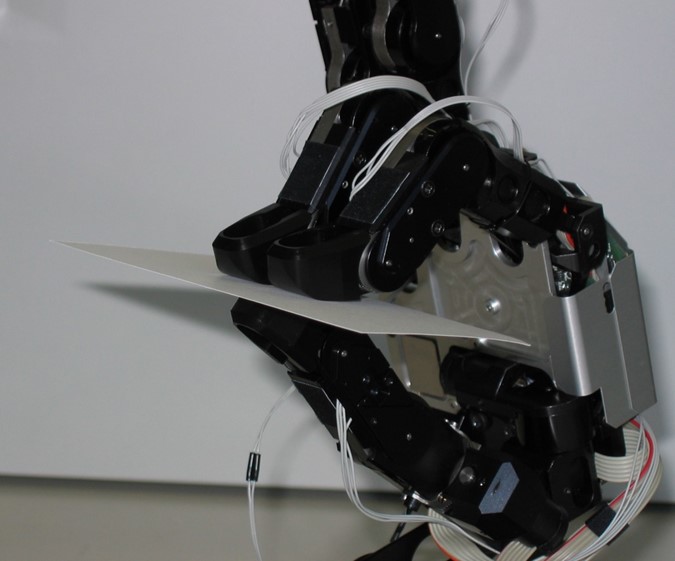

ヒトの手と同じ重さと大きさにこだわったロボットハンド。
全ての種類の指文字が作れたり、薄く柔らかくて壊れやすい物体を器用に操作できる。
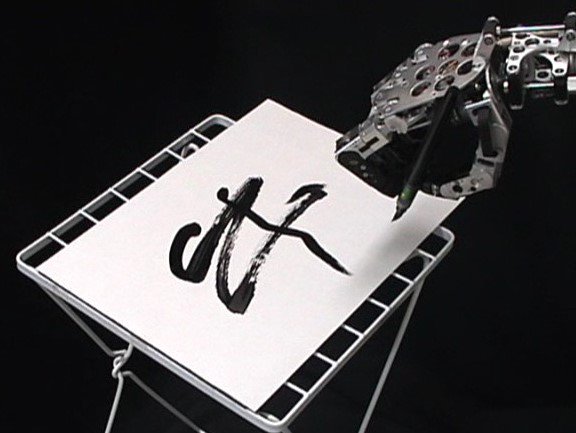
毛筆の筆を持って文字も書ける。
毛筆を握り、達筆で肉と書くロボットハンド
筑波大学に着任する前、星野さんは琉球大学で研究をしていました。沖縄には独特の舞踊の文化があります。地元の人々に誘われて一緒に踊ってみると、踊り方にも作法があり、体を使ったコミュニケーションを感じました。これがとてもかっこよく、脳が手足をどうやって制御しているのか、自分はなぜ彼らのように踊れないのかを突き詰めたくなりました。それがロボットハンドの研究を始めたきっかけです。
脳の研究というと、脳内部の構造を生理学的に探るアプローチが思い浮かびます。これだと、分子レベルの緻密なしくみを調べることはできますが、脳が全体として何をしようとしているのかを理解するのは困難です。一方、星野さんの研究方法は、脳をブラックボックスとして捉え、中身はよくわからなくても、入力と出力の関係から脳がどういう演算をしているのかを数学的にモデル化する、計算論的脳科学というアプローチです。この手法だと、脳の働きを予測することが可能です。脳の一部分を取り除くとどうなるかなどといった実験を実施することはもちろんできませんが、数式ならパラメータを変えることで出力の変化を計算できます。また、ある状態がどのような要因で生じるのかを導くこともでき、病気の診断などにつながります。
作業効率や高機能化の面では、ロボットを人間の形に似せる必要はありません。けれども、星野さんのこだわりはあくまでも人間の手。義手のような使い方を目指すと、そこははずせないポイントです。そして、誰でも「もう1本手があったら・・・」と思ったことがあるでしょう。星野さんの考える義手は、そんな時に装着する3本目、4本目の手です。

研究テーマは学生の自主性を尊重している。
手前のフィギュアやトロフィーは国際学会での受賞記念品。
人間の脳は2本の腕を巧みにコントロールしていますが、それぞれ独立した作業はできません。片方が主、もう片方が従として動きます。同時に複数のことをしているようでも、脳の中では、全体として一つの作業をするような指令が出ているのかもしれません。3本目の手が自律的に全く別の作業を担えるなら、それだけで、もう一人分の仕事ができそうです。
千手観音は千本の手で、多くの人を同時に救済すると言われています。これらの手にはそれぞれ目がありますから、観音様が一人で千本の手を操っているのではなく、1本ずつが独立して働くのだと考えられます。星野さんのロボットハンドも、究極的には、同時に多くの作業をこなして人々を助ける、ロボット界の千手観音になるかもしれません。
文責:広報室 サイエンスコミュニケーター